
Apple has unveiled the lid on its self-driving aspirations, with two of its employees publishing a research paper on a 3D object detection system called VoxelNet.
The paper, titled "VoxelNet: End-to-End Learning for Point Cloud-Based 3D Object Detection," was authored by machine learning and AI researchers Yin Zhou and Oncel Tuzel.
It was published to arXiv.org, a server repository of research papers open to peer reviews with more than 10,000 contributions a month.
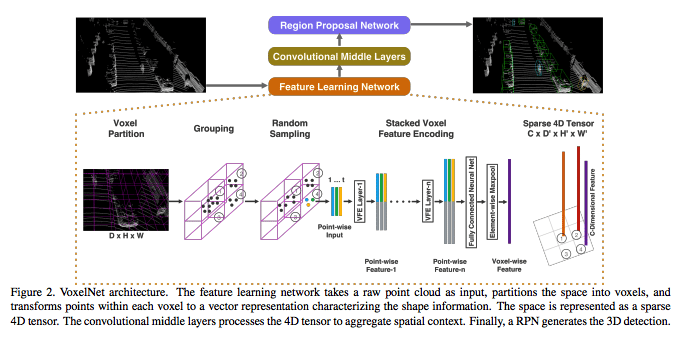
In the paper, they describe a new neural network capable of detecting objects such as cyclists and pedestrians a lot more accurately using only LiDAR data. This system would also resolve resolution issues, replacing patchy imagery full of black spots with higher resolution imagery.
This flies against today's conventional LiDAR platforms which use a setup consisting of expensive cameras and sensors to 'read' the environment, merging images and data to form the basis of its interpretations. Other use cases in virtual reality and robotics also stand to benefit.
There has been no official comment from Apple on how the autonomous research will be used, and in what capacity. To date, Apple has been a highly secretive player in autonomous technology space. However, it is unclear what its end product will be.
All signs point to the development of a self-driving hardware kit (similar to Waymo's approach) rather than building a self-driving car, the original goal of Project Titan, a short-lived project scrapped earlier this year amidst a shift in strategy and departure of key personnel.
To read the paper, visit VoxelNet: End-to-End Learning for Point Cloud-Based 3D Object Detection.
NEXT: IS THERE REALLY GOING TO BE AN ELECTRIC JEEP WRANGLER?
WATCH



